
Voici un résumé de notre premier rapport CanSAT
Nous sommes l’une des deux équipes représentant l’École Decroly. Notre équipe est composée de Cassiel Urbanska, Alexandre Itschert, Nathan Bastin et Louna de Locht. Nous sommes tous en dernière année de secondaire. Notre école participe à ce concours depuis plusieurs années, c’est ainsi que nous en avons eu connaissance.
Nous avons choisi de prendre part au programme CanSat Belgium parce qu’il offre une occasion unique d’appliquer des études scientifiques de manière concrète et pratique. Ce projet nous permet d’expérimenter comment des connaissances scientifiques théoriques peuvent se transformer en expérimentation en conditions réelles, en combinant physique, ingénierie, biologie et analyse de données.
Participer à CanSat est aussi une opportunité unique. Cela nous donne la chance de travailler en équipe sur un projet scientifique complet.
MISSION PRINCIPALE
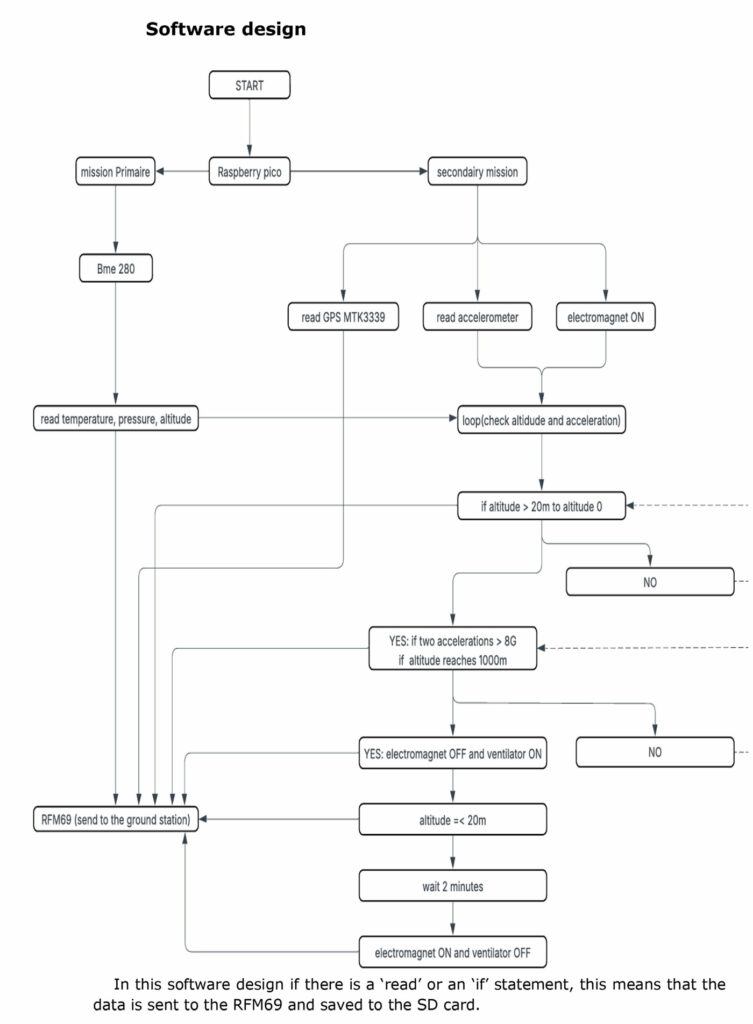
Pendant la mission principale, nous prévoyons de mesurer la pression atmosphérique, la température et l’altitude de notre CanSat. Ces mesures seront obtenues à l’aide d’un capteur BME280-3V3. Ce capteur est bien adapté à nos besoins, car il est compact, fiable et déjà intégré à notre PCB, puisqu’il s’agit du même modèle que celui utilisé lors de l’atelier. Notre carte microcontrôleur est une Raspberry Pi Pico.
Concernant les communications radio, nous utiliserons un module RFM69 pour la station au sol, connecté à une antenne Yagi (composée d’un directeur, d’un dipôle et d’un réflecteur). Pour l’antenne du CanSat, nous utiliserons un câble d’antenne μFL combiné à une antenne SMA 433 MHz intégrée à notre PCB. Un interrupteur à bascule standard sera utilisé pour allumer et éteindre le système.
Notre parachute aura une forme circulaire, d’un diamètre de 33 cm, et sera de couleur orange vif. Il sera équipé de huit anneaux métalliques sur ses bords afin d’attacher solidement les suspentes sans abîmer le tissu. Il comprend également un évent central d’un diamètre de 5,5 cm. Nous avons choisi la couleur orange pour que le CanSat reste bien visible pendant sa descente, facilitant ainsi sa récupération.
Étant donné que la Raspberry Pi Pico ne dispose pas de suffisamment d’espace de stockage, nous prévoyons d’utiliser une carte SD pour enregistrer toutes les informations.
MISSION SECONDAIRE
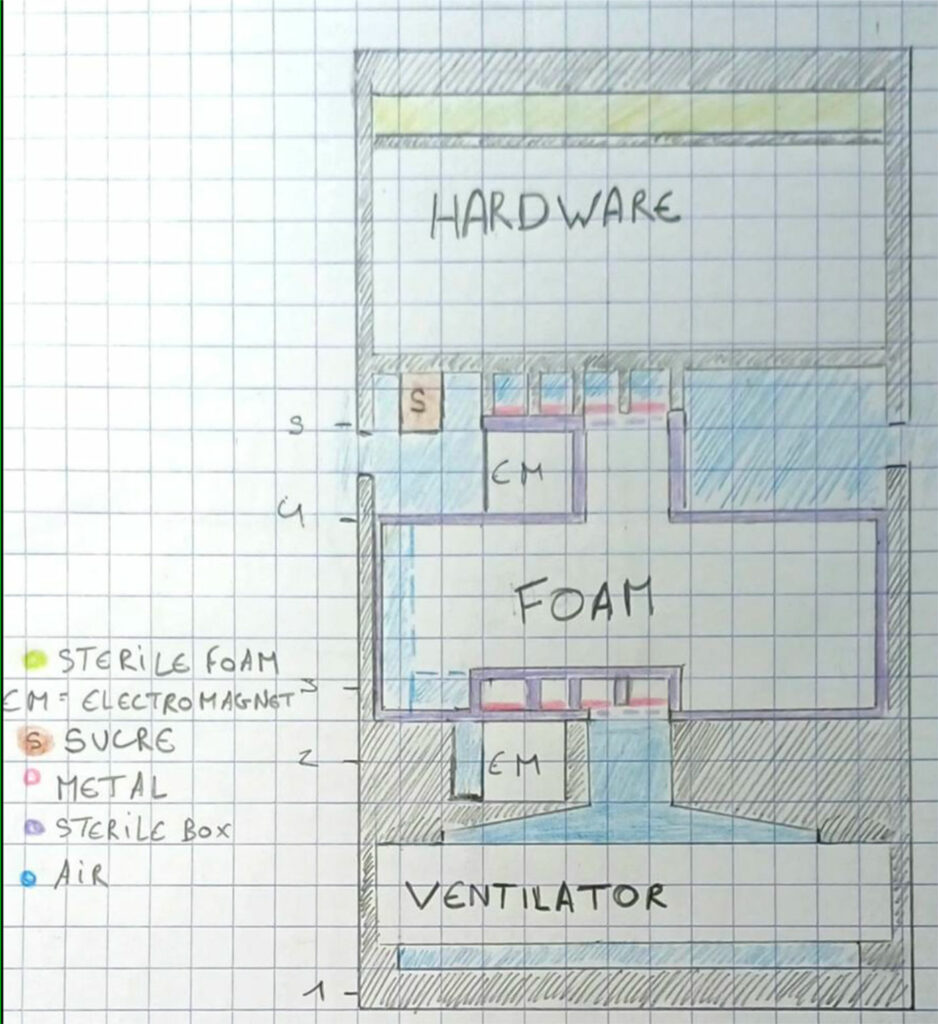
Pour atteindre cet objectif, notre CanSat sera équipé d’un ventilateur placé au fond de la canette. Ce ventilateur sera isolé de l’environnement extérieur par un assemblage en couches de plastique très fin et de mousse. Le but de cette conception est de permettre au ventilateur d’aspirer l’air extérieur dans le CanSat lorsqu’il fonctionne, tout en empêchant l’air d’entrer dans la canette lorsque le ventilateur est à l’arrêt. Notre concept initial pour répondre à ce problème consistait en un clapet qui se détacherait lors de l’impact à l’atterrissage ; cependant, nous avons conclu que ce mécanisme présentait un risque de dysfonctionnement excessif.
L’échantillon collecté passera ensuite par un entonnoir qui le dirigera vers un récipient stérile rempli de matériau en mousse. Nous comptons utiliser une mousse de filtration de qualité aquarium (polyuréthane à cellules ouvertes), car elle est facilement disponible, peu coûteuse et adaptée aux prélèvements. Tout micro-organisme présent dans l’échantillon d’air est censé adhérer à la mousse. La stérilité de ce compartiment sera assurée par un système de fermeture électromagnétique. À l’entrée, un électroaimant maintiendra en place une fine plaque magnétique, empêchant ainsi toute entrée d’air par l’ouverture du ventilateur. Un second électroaimant sera installé à la sortie du récipient de culture, afin d’empêcher également l’air d’entrer par ce conduit. Lorsque les électroaimants sont désactivés, les plaques fines peuvent être légèrement soulevées par le flux d’air généré par le ventilateur, permettant à l’air de circuler dans le système. Un avantage clé de l’utilisation d’électroaimants dans ce projet est qu’ils peuvent être activés à distance : ils peuvent rester engagés pendant le vol du CanSat, puis être désactivés à l’atterrissage (un élément critique à inclure dans le schéma du système).
Un second compartiment, stérilisé selon la même méthode, sera placé à côté du premier mais restera entièrement scellé. Son objectif est de servir de récipient de référence stérile pour valider la stérilité de notre processus d’échantillonnage. Nous l’appellerons le récipient « témoin ».
Après l’atterrissage, les deux récipients seront récupérés, et un échantillon de chaque insert en mousse sera transféré dans des boîtes de Petri séparées. Cela nous permettra de comparer les deux environnements et de tirer des conclusions quant à une éventuelle contamination et à la présence biologique.
Conception du parachute
Notre parachute sera circulaire, d’un diamètre de 33 cm, et sera de couleur orange vif. Il sera muni de huit anneaux métalliques sur ses bords afin d’attacher solidement les suspentes sans endommager le tissu. Il comprend également un évent central d’un diamètre de 5,5 cm. Nous avons choisi la couleur orange afin que le CanSat reste bien visible pendant sa descente, facilitant le suivi et la récupération.
Concernant les calculs de conception du parachute, aucun calcul théorique n’a été réalisé. À la place, nous avons produit un premier prototype (basé sur des parachutes fonctionnels précédents que notre école avait conservés) et nous avons progressivement affiné ses dimensions au cours de plusieurs vols d’essai. Après de multiples essais, nous avons réduit la taille du parachute afin d’aboutir à une configuration optimale, qui ralentit efficacement le CanSat pendant la descente.
Comme nous n’avons pas encore eu l’occasion de tester correctement notre parachute, nous avons calculé sa vitesse de descente afin de vérifier qu’il respecte les exigences.
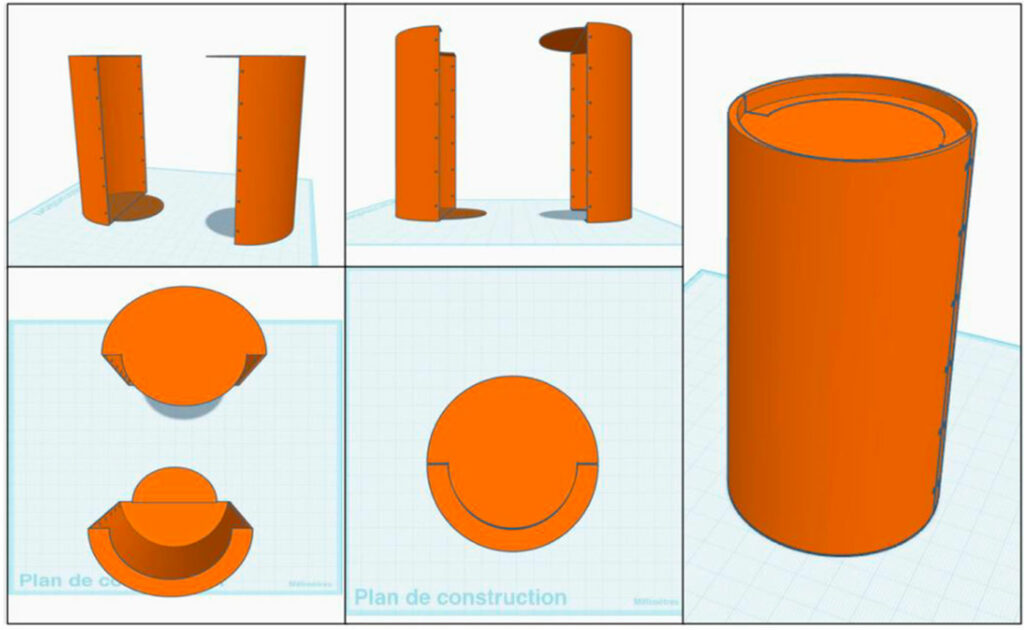
Conception de la canette
La canette sera constituée de deux parties : deux demi-canettes découpées longitudinalement. Elles se chevaucheront sur leur épaisseur, et des tiges filetées traversant les deux sections sur toute leur longueur permettront de sécuriser l’assemblage, tout en rendant l’ouverture simple lorsque nécessaire (voir visualisation 3D). Les deux faces circulaires aux extrémités de la structure cylindrique s’emboîteront également, comme illustré ci-dessous.
Au bas du CanSat, un ventilateur sera directement connecté à un entonnoir qui acheminera l’air vers la mousse. Le fond de la canette sera en retrait de 5 mm vers l’intérieur du CanSat afin de protéger le ventilateur.
Récupération et mise en culture.
Après l’atterrissage du CanSat, nous récupérerons les deux échantillons de mousse (la mousse témoin et la mousse ayant été en contact avec l’échantillon) et les conserverons dans leurs contenants d’origine. Ils seront retirés des contenants dans un environnement stérile, très probablement en travaillant à proximité d’une flamme afin de maintenir des conditions stériles. Les deux mousses seront ensuite soit placées dans un milieu nutritif liquide (bouillon nutritif standard), soit écouvillonnées puis étalées sur une boîte de Petri. Le choix de la méthode la plus pratique est encore à l’étude, les deux options présentant des avantages et des inconvénients : le milieu liquide ne permet pas de différencier les types de micro-organismes présents, mais il favorise une croissance plus rapide et la production d’une biomasse plus importante. Le milieu solide en boîte de Petri, en revanche, permet une observation, une comparaison et une identification plus faciles des différentes colonies, au prix d’une croissance plus lente et moins abondante.
Après 24 heures d’incubation dans le milieu de culture, nous évaluerons les deux échantillons de mousse à l’aide d’un spectrophotomètre (prêt ou acquisition encore à l’étude). Les résultats seront ensuite analysés et comparés.
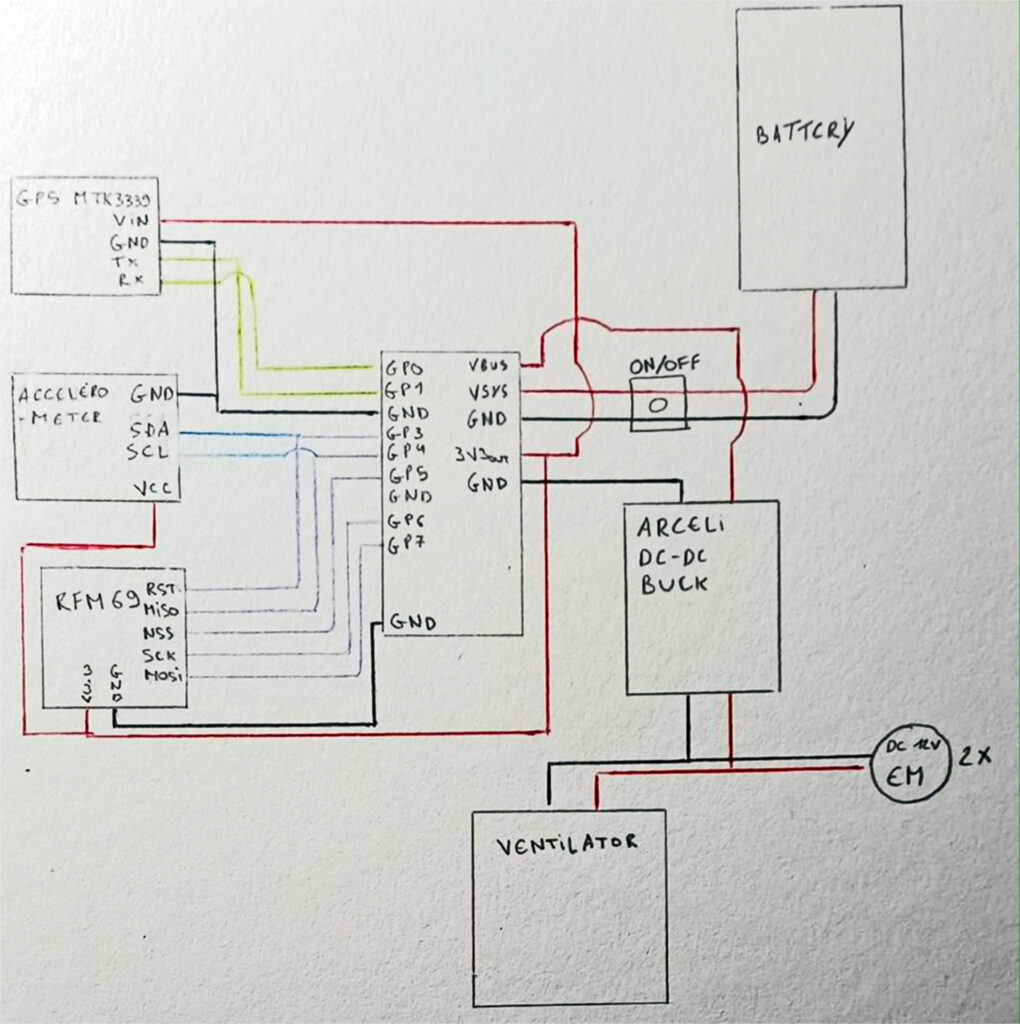
Conception électronique — Vue d’ensemble du système
Nous utiliserons un module radio RFM69, qui nous a été fourni au début du projet. Il est compact, fiable et suffisamment puissant pour nos besoins en communication.
Concernant la mesure environnementale, nous utiliserons un capteur BME280 3V3. Ses performances sont adéquates pour les paramètres que nous comptons mesurer et calculer ; aucun capteur supplémentaire n’est donc nécessaire.
Nous intégrerons également un module Adafruit Ultimate GPS Breakout avec prise en charge de GLONASS. Ce module est compact et fournit le niveau de précision et de fiabilité requis pour notre projet.
En outre, nous prévoyons d’acheter des électroaimants 5 V afin de mettre en œuvre un mécanisme de fermeture efficace, contrôlable à distance, garantissant que le CanSat reste hermétique lorsque nécessaire.
Antenne & acquisition des données
Nous utiliserons la Pico et le PCB fournis dans le kit de base, reliés à une antenne Yagi.
Si nous avons le temps, nous construirons notre propre antenne Yagi, et voici à quoi elle pourrait ressembler.
Traitement des données
Pour notre mission principale : grâce à notre antenne, nous aurons des données en direct sur notre ordinateur, ce qui nous permettra d’effectuer les calculs nécessaires.
Pour notre mission secondaire : nous prévoyons de récupérer notre canette à la fin afin de l’emmener au laboratoire et d’analyser les bactéries que nous aurons collectées. Nous devons aussi vérifier si notre ventilateur et nos électroaimants ont bien fonctionné et ont fait ce que nous attendions d’eux, afin de nous assurer que notre mousse est restée protégée et neutre jusqu’à l’atterrissage.
Système de récupération
Le parachute de notre CanSat est orange vif afin d’être repérable et suivi visuellement ; en complément, nous prévoyons d’intégrer un GPS et un buzzer à notre CanSat, comme éléments standard, afin de pouvoir localiser notre canette où qu’elle se trouve.
Tests
Nous avons déjà testé notre antenne Yagi ainsi que les différents codes nécessaires à la mission principale, et tout fonctionne sans aucun problème. Nous avons commencé à tester notre parachute, qui semble fonctionner correctement, mais nous n’avons pas pu le tester depuis une grande hauteur. Nous prévoyons de contacter la commune de Beersel afin de demander l’accès à son château d’eau, qui est beaucoup plus haut, pour pouvoir y réaliser des essais. Nous avons également effectué quelques premières impressions 3D, mais les plans doivent encore être améliorés.
[CanSAT] Juice
[CanSAT] Belgique
CanSat Belgium (Bruxelles et FWB) – Guide Complet pour les Participant/es